航空機の安定
「安定」とは
「安定」とは、「元の状態に戻ろうとする性質」のことです。ちょっと専門的に言うと、
一般に言う「安定」は主に「静安定」のことを示し、
平衡状態にある系へ擾乱を与えたときに時間の経過により再び平衡状態に戻る場合を「安定」、
時間の経過により平衡点から更に離れていく場合を「不安定」といいます。
少し具体的に言うと、
巡航している航空機が突風を受けて姿勢が変化したときに、パイロットが特に操舵しなくても最終的に元の姿勢に戻る場合を「安定」、
姿勢がより変化して元の姿勢に戻らない場合を「不安定」といいます。
「静安定」と「動安定」
平衡状態にある系に擾乱を与えたときの、元の状態に戻るまでの変化の仕方により、
「安定」とは、「静安定」と「動安定」で細分化できます。
1 「静安定」
静安定とは、「元の状態に戻ろうとする性質の度合い」を示す言葉です。
・状態が変化したときに元の状態に戻ろうとする性質を持つ場合、「静安定が正」と言い、
・状態が変化したときに元の状態に戻ろうとする性質を持たない場合、「静安定が負」と言います。
2 「動安定」
動安定とは、「元の状態に戻ろうとする際の変動の仕方」を示します。
「元の状態に戻ろうとする」ことが前提なので、「静安定が正」のときにしか動安定の概念は存在しません。
・状態の変動が時間の経過とともに減衰する性質を持つ場合、「動安定が正」と言い、
・状態の変動が時間の経過とともに増幅する性質を持つ場合、「動安定が負」と言います。
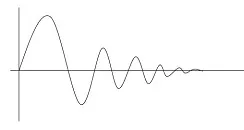
| 静安定「正」 動安定「正」 1 |
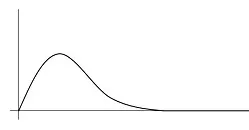 |
静安定「正」 動安定「正」 2 |
 |
|---|---|---|---|
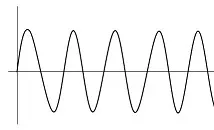
| 静安定「正」 動安定「中立」 |
 |
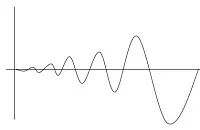
静安定「正」 動安定「負」 |
 |
| 静安定「中立」 | 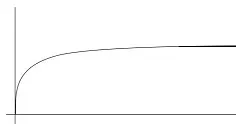 |
静安定「負」 | 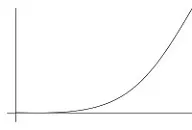 |
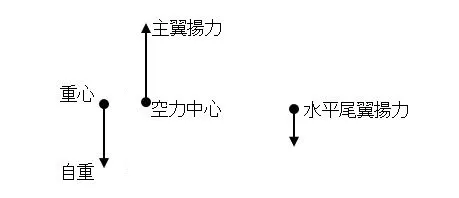
航空機の縦の安定
航空機の縦の安定とは、航空機の前後、上下、そして機種の上下回転の運動のつり合いのことを言います。縦揺れ(Pitch)の安定
主に重心位置や水平尾翼の揚力により影響を受ける
(1) フゴイド運動
周期が10s以上の長周期運動
高高度低速で起こりやすい
主に機体の位置エネルギーと速度エネルギーの周期的な変換が起こす運動であり、その動きはトロコイド曲線を描く。
フゴイド(phugoid)は F.W.Lanchester(1868-1946)が1908年に出版したAERODYNAMICS にて命名した造語です。
ギリシャ語の「φυγη(フィグィ:Flight)」と「ειδοσ(エイドス:形態)」の2単語を元に「flight-like」という意味合いを意図して作られたとされています。
しかし、英単語の「Flight」には「① 飛行(語源:flyht )」の意味と別に「② 逃亡(語源:flee )」という意味もあり、「φυγη(フィグィ)」はこの「逃亡」という意味の「Flight」を指している言葉ですので、この造語の妥当性は不適切かもしれないと著者のF.W.Lanchester自身も記載している。
ただ、適切かどうかは別として、「フゴイド」という言葉は航空業界の専門用語として定着しました。
(2) ポーポイズ
激しい短周期運動
低高度高速で起こりやすい
特に、着陸時に十分な減速ができていない場合に、ノーズギアから接地してしまった場合などに発生し、機体の構造破壊を引き起こしかねない危険な運動です。
イルカが水面から飛び出して泳ぐ様相になぞらえて、イルカのその動きを表す「ポーポイズ」という言葉が付けられている。
航空機の横・方向の安定
航空機の横・方向の安定とは、横滑り、ロール回転、ヨー回転の運動のつり合いのことを言います。横安定 :横揺れ(Roll)の安定 :主に左右の揚力の差の影響
方向安定:偏揺れ(Yaw)の安定:主に垂直尾翼の働きの影響:風見鶏の原理
(1) ダッチロールモード
航空機固有の振動モード
機首が8の字を描くように運動する。
方向安定が比較的小さく、横安定が比較的過大である際に生じやすい。
①突風等により航空機がバンクをとり、横滑りが生じる。
②横滑り内側の翼は揚力が増し、横滑り外側の翼は揚力が減少してバンク角を減少させる方向へ航空機がロールする。
③過大にロールして逆側へバンクを取り、逆側への横滑りが生じる。
④以下同様にこの運動が続く。
簡単に想像するなら、自転車のペダルを後ろ向きに漕ぐことを想像してみてください。
翼端の動きが自転車のペダルです。
ヨーダンパ(方向安定増加装置)をつけることで減衰比を大きくし、過大な運動にならないように対処されます。
昔のオランダ人のスケートのスタイルに似ていることから「ダッチロール」と言われていると一説に言われています。
ダッチロールで大惨事にはなるのはまれですが、乗り心地が最悪で乗客が吐き気を催すことになります。
ダッチロール振動は周期が非常に短い (数秒) ため、パイロットの操舵で修正しようとすると過大な修正操舵によって自分で悪化させることが往々にしてあります。
操舵をするのではなく、ラダーペダルが動かないように足をしっかりとペダルに乗せて、後は待ってください。
それだけで横方向の安定性が増大し、減衰率が上がります。
それでも十分でない場合には、操舵で振動を抑えなければなりませんが細心の注意とある程度の練度が必要です。
自分で悪化させないように、半量修正を意識してください。
とはいえ、ダッチロールに陥ることは比較的まれです。
(2) スパイラルモード
ゆっくりとした非振動モード
横安定が比較的小さく、方向安定が比較的過大である際に生じやすい。
①突風等により航空機がバンクをとり、横滑りが生じる。
②方向安定の風見効果により、機首が横滑り内側方向へヨーイングする。
③結果、更にバンクが深くなる。
④加速しながら螺旋降下する。
(3) ロールモード
速い非振動モード
ヨーイングを0とした、純粋なロール運動のこと。
(4) アドバースヨーとプロバースヨー
エルロンを操舵した際に生じる横滑り運動のこと。
エルロンを操舵した際に機首が旋回外側へ振られる動きを「アドバースヨー」と言い、
エルロンを操舵した際に機首が旋回内側へ振られる動きを「プロバースヨー」と言う。
主に航空機はアドバースヨーを生じる方向へ設計されることが多い。
①右旋回をする様に操舵した際、右エルロンは上方へ、左エルロンは下方へ動く。
②右翼の抗力が減少し、左翼の抗力が増大する。
③左方向へのヨーイングが発生する。 ←アドバースヨー
プロバースヨーを生じる航空機は、上反角効果がロール角速度を助長するため、ロール角速度の制御が難しく、操縦負荷が大きくなる。
高翼機と低翼機
一般に、高翼機は低翼機より横運動に安定している。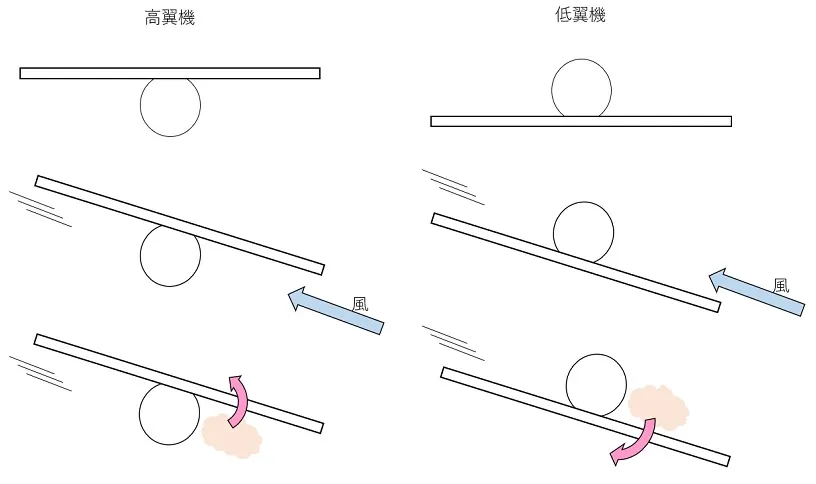
高翼機の場合
横滑りが生じた際、翼下面と胴体の間の圧力が上昇し、バンク角を減少させる方向へ力が生じる。
低翼機の場合
横滑りが生じた際、翼上面と胴体の間の圧力が上昇し、バンク角を増大させる方向へ力が生じる。
低翼機の場合、このままだと操縦が困難なので、 「上反角」をつけたり、「後退翼」として、横安定の増大を図る。
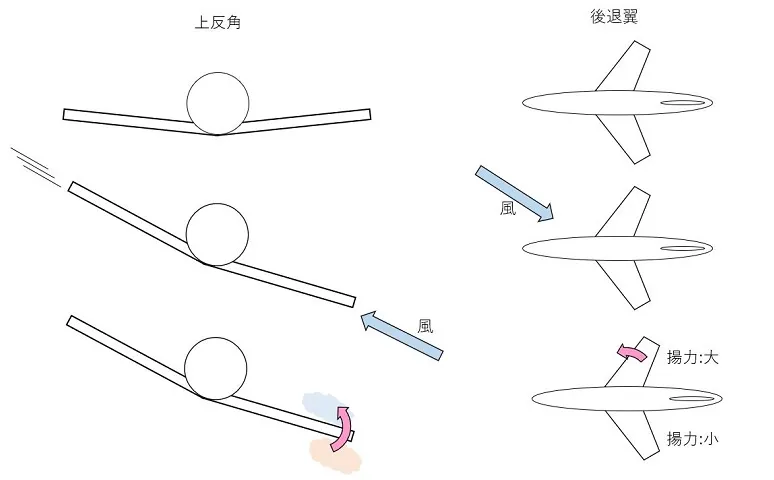
「上反角」を付けることにより、翼に風が当たる角度を変え、翼下面の圧力を高く、翼上面を負圧にすることで、
バンク角を減少させる方向へ力が生じる。
「後退翼」とすることで、左右の翼に当たる風の角度を変え、内側の翼の揚力が増大し、外側の翼の揚力が現象することで、
バンク角を減少させる方向へ力が生じる。
このように、横安定性を増大させることを「上反角効果」という。
上反角を付けることは当然ながら、後退翼とすることも「上反角効果を与える」と言うように表現される。
また、「後退翼」とすることは「上反角効果」が大きすぎるため、横安定性が過大となってしまうことから、バランスをとるために「下反角」をつけることも多い。