航法
1 メルカトル図法・ランバート図・正距方位図
地図は「座標系」で表現が決まります。「座標系」=「測地系」 + 「投影法」です。
「測地系」とは、雑にいえば「地球の大きさの定義」です。
「投影法」とは、球表体を平面にプロット(描画)するやり方です。
世界測地系「WGS84」
アメリカ国防総省が構築した測地系で、GPSで使用されている位置情報の基準です。
WGS84楕円体
長半径a(赤道半径): 6378137.0m
扁平率の逆数1/f:298.257223563
日本測地系2024「JGD2024」
2026年3月現在、日本が採用している測地系で、世界測地系であるITRF(国際地球基準座標系)に基づいた位置情報の基準です。
ITRF座標系GRS80楕円体
長半径a(赤道半径): 6,378,137.0m
扁平率の逆数1/f:298.257222101
WGS84とGRS80(JGD2024)は、扁平率が極々わずかに異なりますが、短半径が約0.1mm違うだけで、実用上は同一の楕円体として考えて問題ありません。
メルカトル図法
日本語では「正角円筒図法」とも言います。
メルカトルさんが考案した投影法なので、メルカトル図法といいます。
地球の球形を円筒に投影したもので、地軸と円筒の芯を一致させ投影するため、通常は赤道を基準線として、南北に離れると拡大します。
そのため、距離や面積は正しくないという特性があります。
日本では中学でも習い、世界地図にも良く使用されるため、最も名の知られた図法だと思います。
WEBメルカトル
投影法:メルカトル球体補正
測地系:WGS84
googleマップなどで使用されている地図はWEBメルカトルと言われます。
経度緯度の決定にはWGS84が使われますが、投影する際の回転楕円体は
長半径(赤道半径):6378137.0
扁平率の逆数:0
の完全な球体が使われています。
地理学的には誤りを感じますが、Googleという大企業の影響力はすさまじく、もはや世界的スタンダードの一つとなってしまいました。
ランバルト正角円錐図法
区分航空図にはランバルト正角円錐図法が使用されています。
極点を頂点とした扇形の地図で、特に中緯度において歪みが小さく、国土地理院の50万分の1地方図と100万分の1国際図でも使用されています。
方向、角度、および形状は維持され、距離は緯線に沿った経路の距離のみが正確です。
縮尺、面積、および距離は標準緯線から離れるにつれて歪んでいきますが、任意の緯線上の歪みは同じで、中心子午線に対して対称的です。
正距方位図法
国際線の最短経路(大圏コース)を見る際には、正距方位図法が使用されています。
中心からの距離と方位が正しく記され、地球全体が真円で表される投影法です。
地球の裏側の一点が地図の円周となり、円周に近づくほど引き伸ばされて歪みが大きくなります。
極心平射図法(ポーラーステレオ図法)
マニアックではありますが、気象庁の地上天気図にはポーラーステレオ図法が使われていまます。
緯線は、同心円として表示され、経緯線の交点はすべて 90°です。
極点から離れるにつれて、緯線の間隔は急速に大きくなり、反対極を描画することはできません。
角度と形状は正確に維持されますが、標準緯線から離れるにつれて面積、距離の歪みは急速に大きくなります。
2 真北と磁北
「地理北極(Geographic North Pole)」地球の自転軸が地表と交わる北側の点のことを「地理北極(Geographic North Pole)」と言います。
この地理北極を指す方向が「真北(True North)」です。
緯度 90°Nの点を指す方向であり、北極星のある方位です。
地球の自転軸は数十万年単位でごくわずかにぶれているため、厳密にいえば数mレベルでの揺れがありますが、ほぼ動かないと考えて問題ありません。
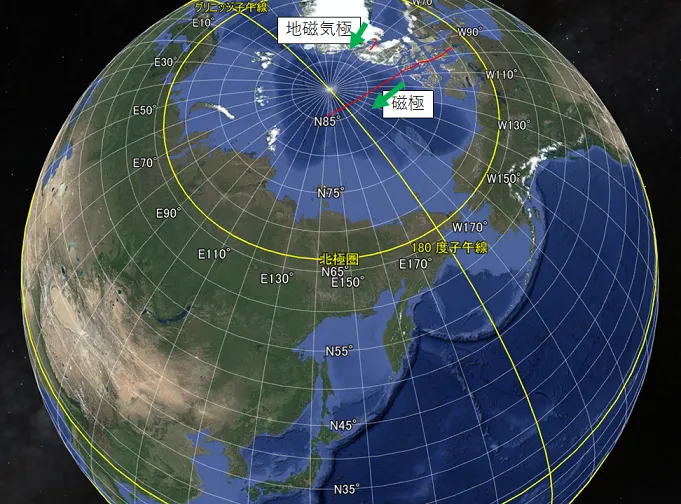
「地磁気極 (Geomagnetic pole)」
「地球の地磁気を地球中心の短い棒磁石で近似したときの棒磁石の軸」と「地表」との交点のことを「地磁気極 (Geomagnetic pole)」と言います。
地磁気北極は2025年には北緯80.8度、西経72.8度のクイーンエリザベス諸島付近にあり、ゆっくりと移動しています。
「磁北極 (Magnetic North pole)」
磁石の針が鉛直を指す(伏角が±90度になる)北半球の地点のことを「磁北極 (Magnetic North pole)」と言います。
各地点で順次、磁石が指す北の方向に向きに変えながら進むと到達し、その地点では鉛直自由度のない通常の方位磁石は針の向きが不定となります。
南北両半球に1つずつとは限らず沢山あることもあり得るが、2025年現在は両半球に1つずつ存在しており、Geological Survey of Canadaが毎年測量を行っています。
動きが地磁気極に比べてかなり速く、特に近年はその動きがとりわけ速くなっており日変化も数十kmとなります。
「磁北(Magnetic North)」
「磁北(Magnetic North)」とは各地点で磁石が指す北方向のことです。
局所的な地球磁場の影響を受け、 地磁気北極と磁北極の向きのどちらとも異なります。
シベリア・バイカル湖の北の地域は磁北極からかなり離れているにもかかわらず、 北半球でもっとも地磁気が強くなっており、あたかも磁極があるかのような「偽磁極」とでもいうべき分布をしています。
日本付近では、このシベリア付近の異常分布が大きく影響し、磁北もこの「偽磁極」に引かれる形で、 地理的な北よりもかなり「西」に傾いています。
3 偏角
「偏角(variation)」とは磁北を地理北極の向きから東向きに測った角度をいいます。現在日本付近で見ると地磁気北極、 磁北極のどちらも地理北極から東にあるにもかかわらず、偏角は負で、磁北は地理的な北よりも西を向いています。
IGRF-14によると、2025年の京都 (北緯35.0度、東経135.8度) では、地磁気北極は東へ4.9度、磁北極は東へ0.3度の方向ですが、 偏角は-8.1度 (西に8.1度) になります。
日本では国土地理院によって観測されており、
2026年3月現在は 「2020.0年値」 が最新の値となっており、
緯度と経度を変数として、
偏差 $D_{2020.0}= 8^{\circ{}}15.822' +18.462' \varDelta \phi -7.726' \varDelta \lambda +0.007'(\varDelta \phi)^2 -0.007'\varDelta \phi \varDelta \lambda -0.655'(\varDelta \lambda)^2 $
ただし、$\phi$ は緯度(度単位)、$\lambda$ は経度(度単位)で、
$\varDelta \phi = \phi - 37^{\circ{}}N$
$\varDelta \lambda = \lambda - 138^{\circ{}}E$
の式で表されます。
なお、$D_{2020.0}$は真北を基準に反時計回り(西回り)を正として計算されます。
とは言え、こんなややこしい計算をしなくてもAIPには空港のバリエーションが書いてありますし、
地理院地図には 地理院タイル で示されています。

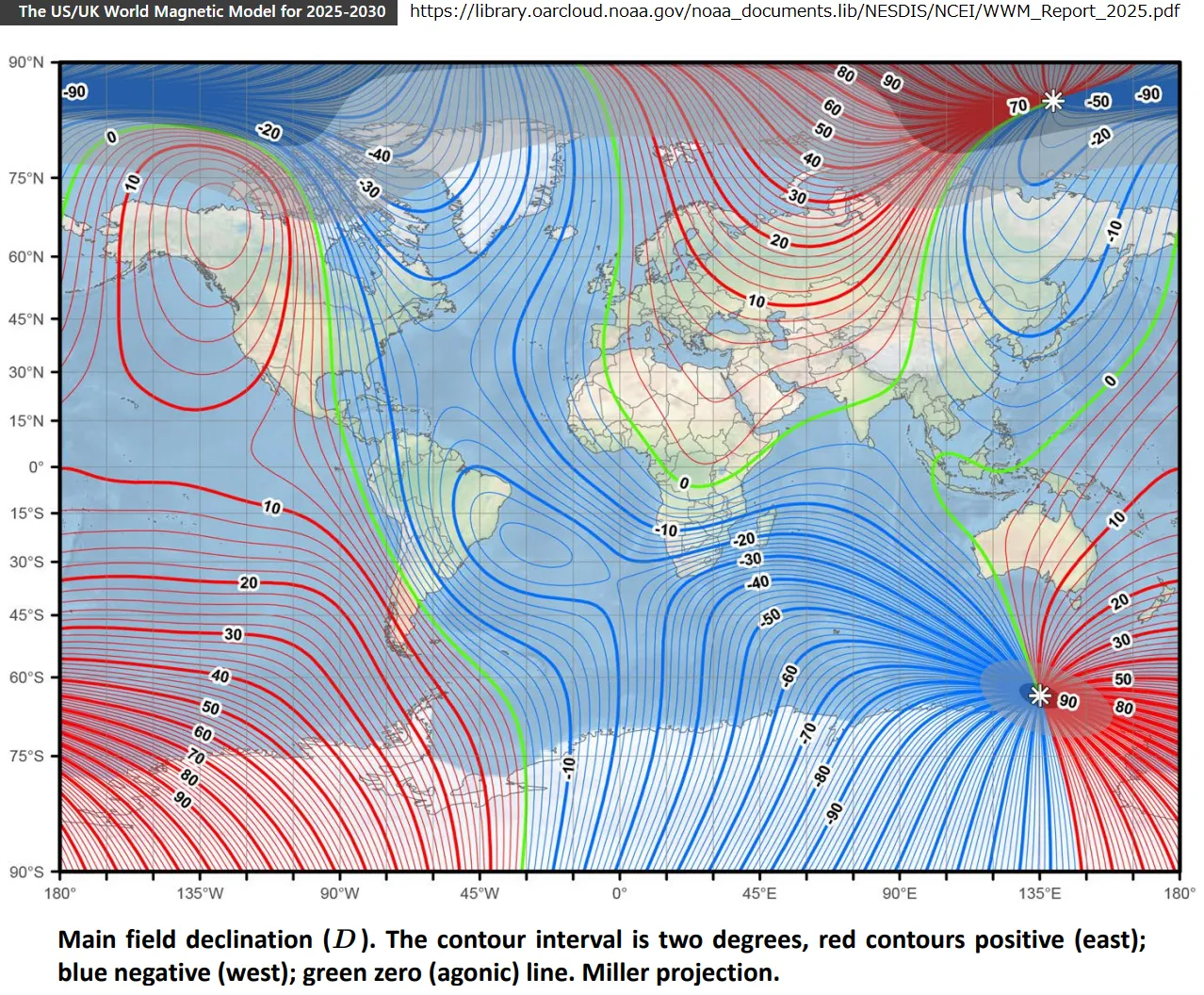
また、世界ではNOAAの発表している The US/UK World Magnetic Model for 2025-2030 などのレポートで見ることができます。
4 自差
自差は各コンパス固有の誤差です。飛行場のコンパスローズ上で測定され、各方位を向いたときにそのコンパスがどれくらい誤差を含むかを示します。
コンパスも高性能化しているので、誤差は小さくなってはいますが、大きいものだと3度も4度も違ったりします。
古いセスナではエアコンをつけるだけで10度の自差が出たりします。
まぁ、エアコンがついてるだけで比較的新しいセスナなのですが.....
5 WCA
「Wind Correction Angle」の略で、所望の経路を飛行するためにとるべき、「「航空機の機軸」と「速度の水平ベクトル」のなす角」のことです。
「無風」「正面風」「背風」の場合、WCAは0度になります。
航空機の推力ベクトルに、横方向の風成分が吹いたとき、WCAが必要となります。
逆に、所望のコースを飛行しているときに生じたWCAと速度差異を考慮することで、どの方向からどれくらいの風が吹いているのか計算することもできます。(測風)
6 野外飛行
野外飛行とは「航法技術の習得を目的とした飛行」のことを指します。勘違いされることも多いですが、「航法技術の習得を目的」としていればローカルフライトでも野外飛行になり、距離も関係ありません。
航空法施行規則 別表第二 にある、事業用と自家用の「出発地点から○○○キロメートル以上の野外飛行で、中間において○○○回以上の生地着陸をするもの」の解釈と運用は、
平成6年11月16日発刊の「空乗第2129号」に示されており、
飛行機の場合
自家用操縦270km以上・事業用操縦士540km以上
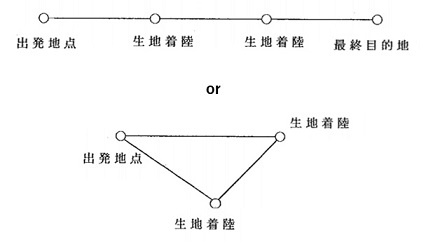
・中間における2回の生地着陸は、「異なる地点」
・飛行距離は、実際に飛行した経路に沿った距離ではなく、出発地-生地着陸地-目的地を直線で結んだ距離
・「生地着陸」とは、日常、離着陸基地として使用している飛行場以外の飛行場へのフルストップによる着陸のこと
となります。
7 地文航法・天体航法
地文航法とは、地形地物と航空図を目視で判読して行う航法です。主として岬や駅、線路、高速道路などのランドマークを使用します。
最も初歩的で基本となる航法ですが、難しい面があり難関となります。
天体航法は星の位置により進路を算出する方法です。
最も初歩的な航法ですが、流石に現代ではほぼほぼ活用することはありません。
例)太陽に時計の短針を向けると12時と短針の中間が南
北極星のある方が北
腕を伸ばすと、親指の爪幅が約2度、人差し指から小指の爪幅が約1度、こぶしは約10度、掌が約20度 etc...
8 推測航法
推測航法とは、推測位置を基に行う航法です。無線航法施設など無かった過去には地文航法や天体航法とともに組み合わせて行われたようですが、
現代では航法装置のトラブルなどが起きた際の予備的な位置づけとなっています。
緊急時に頼れるのは、原始的な地文・推測航法になるため、とっさの判断で行うことができるように普段から意識しておくことが大切です。
10 無線航法
電波航法とも言われ、航法装置を基に行う航法です。NDB・VOR・TACAN・ILS・DME・GNSS などの種類があります。
最新のGNSS装置では「誤差数cm」と言われるほど非常に精度高く技術進歩が進んでいます。
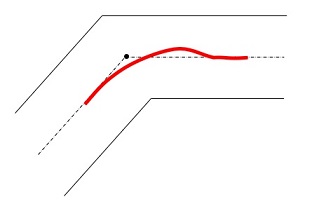
9 フライオーバー、アーリーターン、リードターン
フライオーバーとはポイント上空をヒットして旋回を開始する方法です。当然、ポイントを通り過ぎて経路に乗りなおすことになります。
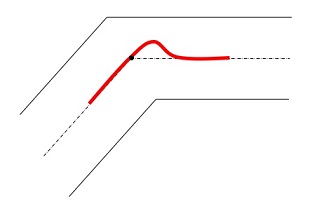
アーリーターンは、オーバーシュートを減少させるために、ポイント上空の手前で旋回を開始する方法です。
| 変針角 | 変針点までの距離 |
| 15° | (旋回半径)×0.1 |
| 30° | (旋回半径)×0.2 |
| 45° | (旋回半径)×0.3 |
| 60° | (旋回半径)×0.4 |
| 75° | (旋回半径)×0.6 |
| 90° | (旋回半径)×0.8 |
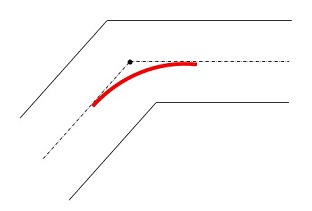
リードターンは、旋回半径を考えて、オーバーシュートを0にして正確に次のlegへ乗る旋回の方法です。
| 変針角 | 変針点までの距離 |
| 15° | (旋回半径)×0.15 |
| 30° | (旋回半径)×0.3 |
| 45° | (旋回半径)×0.45 |
| 60° | (旋回半径)×0.6 |
| 90° | (旋回半径)×1 |
リードターンが一番機械的に正確です。
しかし、高度・速度・風の影響やBank確立までの誤差、正確な現在地の把握などはとても難しく、
リードターンをしようと思っても大体がEarly turnになると思います。
10 リード量
1 ラジアルからアークへの族回のリード量(1) 標準率旋回 対地速度の0.5%
(2) 1/2標準率旋回 対地速度の1%
(3) バンク角 30度 (MPM-2)又は(MACH x10-2)
2 アークからラジアルヘの旋回のり一ド量
バンク角30度 (MPM-2)×60/アークの半径
3 アークの保持
(1) 連続した旋回による方法
バンク角 (MPM-2)×30/アークの半径
(2) 連続した短い直線飛行による方法
ベアリング・ポインターを参照点よりも5~10度上方に置くようにロールアウトしてヘデイングを保持し、
ベアリング・ポインターが参照点の5~10度下方に来ると、再度ロールインし、(1)(2)を繰り返す。